Ahmet Tunc
About
Notes
Blog
Projects
CV
TR
EN
Toggle Menu
Back to Tags
Topic:
MEKF
Projects
(1)
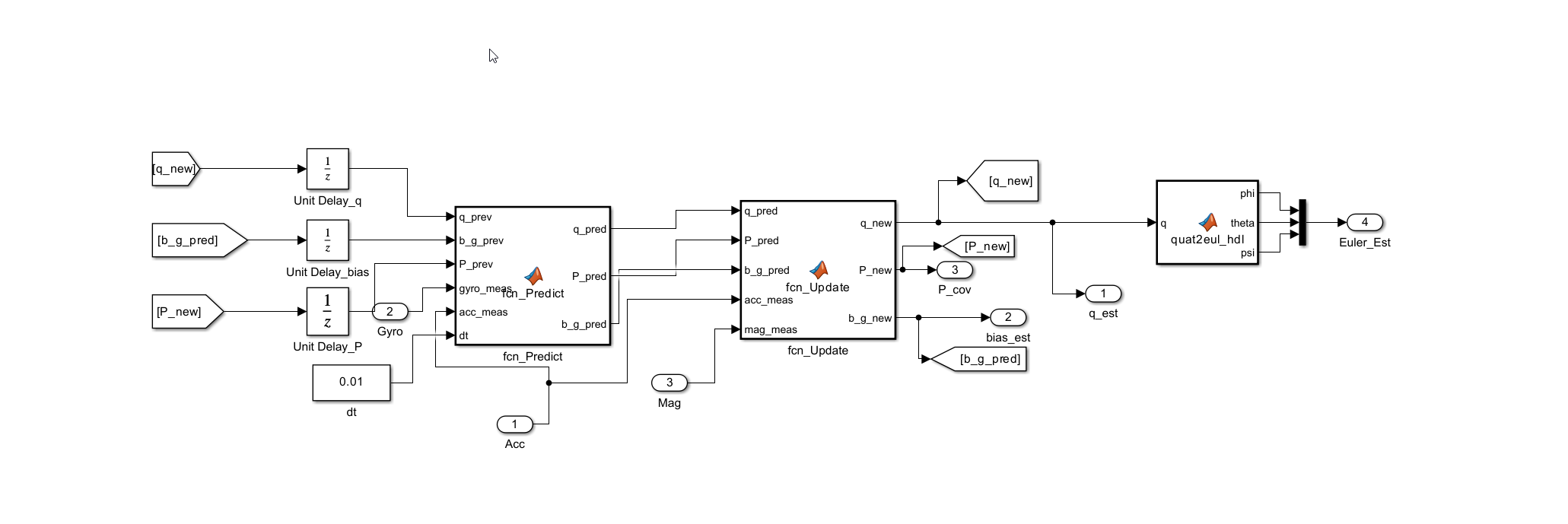
Quaternion-Based Multiplicative Extended Kalman Filter (MEKF)
Attitude estimation pipeline developed in MATLAB/Simulink and deployed on STM32G431KB: gyro prediction + sequential accel/mag vector updates with adaptive noise and gating.