Quaternion-Based Multiplicative Extended Kalman Filter (MEKF)
Attitude estimation pipeline developed in MATLAB/Simulink and deployed on STM32G431KB: gyro prediction + sequential accel/mag vector updates with adaptive noise and gating.
TL;DR: I built a quaternion-based MEKF for real-time attitude estimation: gyro-driven prediction + two sequential 3D vector updates (accelerometer then magnetometer). The filter was prototyped in MATLAB/Simulink and deployed on STM32G431KB in C.
Problem
Reliable attitude estimation on resource-constrained embedded hardware requires:
- stable 3D orientation representation (avoid gimbal lock),
- robustness to vibration / acceleration bursts and magnetic disturbances,
- predictable compute and memory usage for real-time execution.
Gyro integration alone drifts over time; accelerometer and magnetometer provide long-term references but are often corrupted during maneuvers or in disturbed environments.
Approach: Quaternion MEKF (Right-Multiplicative)
This implementation follows a multiplicative error-state formulation:
- Nominal state uses a unit quaternion
q. - The error state is a small-angle rotation
δθand gyro bias errorδb(total size 6). - Corrections are applied right-multiplicatively:
q ← q ⊗ δq(δθ)
δq(δθ) ≈ [1, 0.5*δθ] (then normalized)Sensor usage
-
Prediction: gyro (bias-corrected)
-
Update: two sequential direction measurements
- Accelerometer (gravity direction → roll/pitch stabilization)
- Magnetometer (magnetic field direction → yaw stabilization)
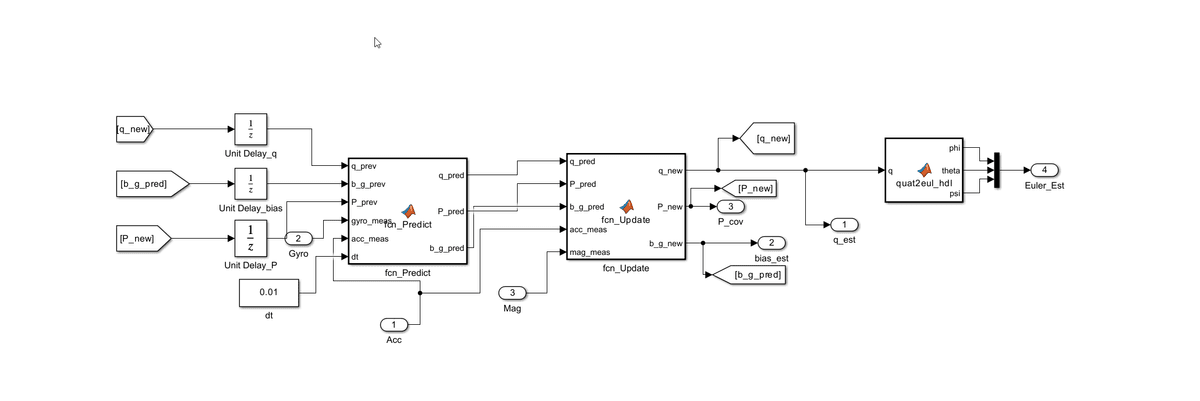
System Block Diagram (Simulink)
Estimator Pipeline
- Bias correction
ω = ω_meas − b_g- Quaternion propagation
q ← q ⊗ dq(ω, dt)- Covariance propagation
P ← Φ P Φᵀ + Qd-
Accelerometer update (gating + adaptive R)
-
Magnetometer update (gating + adaptive R)
-
Outputs: quaternion + Euler angles.
Embedded Deployment (STM32G431KB)
Implementation priorities:
- small fixed-size math (3×3, 6×6) without external dependencies,
- numerically stable covariance update (Joseph form),
- measurement gating to reject outliers,
- adaptive tuning to keep the filter responsive during fast rotation.
Core Implementation Notes
Adaptive process noise (Static vs Dynamic)
A simple motion detector switches noise parameters based on accelerometer and gyro magnitudes:
- Static mode: bias is allowed to evolve faster (learn bias);
- Dynamic mode: bias is nearly locked (avoid chasing motion).
Additionally, the gyro process noise is scaled with angular-rate magnitude:
adaptive_scale = 1 + 2*|ω|Code Snapshots
The following excerpts show structure and key design choices (not full derivations).
Prediction (Gyro integration + P propagation)
void mekf_predict(MEKF* f, const vec3f_t omega_meas, const vec3f_t acc_meas, float dt)
{
// omega_corrected = omega_meas - b_g
vec3f_t omega_corrected = {
omega_meas[0] - f->state.b_g[0],
omega_meas[1] - f->state.b_g[1],
omega_meas[2] - f->state.b_g[2]
};
// Static/Dynamic detection using |acc|-1 and |gyro|
// -> choose gyro/bias noise levels
// Adaptive process scaling: 1 + 2*|omega_corrected|
// Quaternion propagation (body-frame): q <- q ⊗ dq
// Covariance propagation: P <- Phi * P * Phi^T + Qd
}Shared 3D direction update (Accel/Mag)
static void mekf_update_dir(MEKF* f,
const vec3f_t z_body,
const vec3f_t ref_dir,
const mat3f_t R_meas)
{
// Normalize z
// a_hat = R(q)^T * ref_dir (R: nav->body)
// r = z - a_hat
// H = [skew(a_hat), 0]
// S = HPH^T + R
// Gate using gamma = r^T S^-1 r (df=3)
// K = P H^T S^-1
// dx = K r -> dtheta, dbias
// Right-multiplicative correction:
// q <- q ⊗ dq(dtheta)
// b_g <- b_g + dbias
// Joseph form covariance update
}Sequential updates (Accel then Mag)
void mekf_update_accel(MEKF* f, const vec3f_t accel_body)
{
// Norm gate: 0.6g - 1.4g
// Adaptive R: exp(|norm-1| * 8), clamped
mekf_update_dir(f, accel_body, f->g_ref, R_acc);
}
void mekf_update_mag(MEKF* f, const vec3f_t mag_body)
{
// Norm gate: 0.5 - 1.5
// Adaptive R: exp(|norm-1| * 5)
mekf_update_dir(f, mag_body, f->m_ref, R_mag);
}Quaternion utilities (minimal)
// Convention: [w, x, y, z]
// Hamilton product: q = q1 ⊗ q2
quat_t q_mul(quat_t q1, quat_t q2);
// δq(δθ) ≈ [1, 0.5*δθ] then normalize
quat_t q_from_small_angle(const vec3f_t dtheta);
void q_to_rotmat(quat_t q, mat3f_t R);
void q_to_euler(quat_t q, vec3f_t euler_rad);